Ned 2 este conceput pentru a reproduce toate mișcările necesare celor mai avansate utilizări cu o precizie și o repetabilitate de 0,5 mm.
Structura din aluminiu a lui Ned îl face exemplar robust și neted, permițându-i să realizeze cu fluiditate mișcările necesare proiectelor dumneavoastră de robotică.
Acest cobot profită de capacitățile Raspberry Pi 4, cu un procesor ARM V8 de înaltă performanță pe 64 de biți, 2 Gb de RAM și o conectivitate îmbunătățită.
Ned 2 este un robot colaborativ bazat pe Ubuntu 18.04 și ROS (Robot Operating System) Melodic, o soluție open-source creată pentru robotică. Prin ROS, Ned are mai multe biblioteci permițându-vă să concepeți multe programe de la cele mai simple la cele mai complexe, răspunzând apoi, într-un mod flexibil, nevoilor dumneavoastră.
Utilizări
Utilizarea Ned for Education and Research înseamnă a avea un robot colaborativ cu utilizări fidele realității industriale:
Utilizați o metodă de programare vizuală pentru cele mai simple procese (Blockly, similar cu Scratch),
Creați-vă propriile programe permițându-vă să creați procese complexe, cum ar fi programe create pentru multirobot sau care necesită utilizarea inteligenței artificiale pentru viziune.
Prototipați scenarii industriale complete, cum ar fi „pick & place” (ridicați un obiect pentru a-l muta), „pick & pack” (luați un obiect și introduceți-l într-un ambalaj)...
Cum controlezi Ned 2?
Activați modul de învățare al lui Ned pentru a-l poziționa manual și pentru a-l învăța cum să le reproducă. Controlul Ned poate fi la fel de ușor ca apăsarea unui buton.
Cu Niryo Studio, aplicația noastră desktop gratuită, utilizați blocuri pentru a vă crea propriile programe robotice. Bazat pe Blockly (similar cu Scratch), interfața noastră de programare vizuală vă permite să creați rapid și ușor programe robotizate fără cunoștințe anterioare de programare.
Utilizați un Arduino sau un Raspberry Pi pentru a controla Ned prin intrările și ieșirile sale digitale (tutorial).
Utilizatori avansați: dezvoltați propriul controler (utilizați un mouse de computer, o tastatură, un controler de joc sau Leap Motion pentru a controla Ned în funcție de preferințele și nevoile dvs.), utilizați API-ul nostru (Python, Modbus, TCP) pentru a controla Ned direct sau de la distanță, sau scufundă-te direct în codul ROS, care este open-source.
Specificatii tehnice
Numărul axei 6
Greutate 7 kg
Sarcina utila 300 g
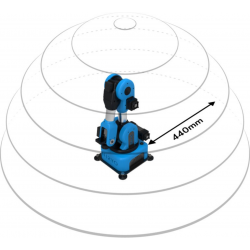
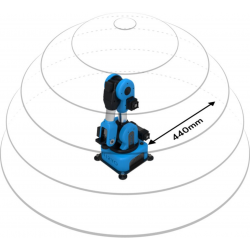
Atingerea maximă 440 mm
Precizie +- 0,5 mm
Repetabilitate +- 0,5 mm
Sursa de alimentare 12 Volti / 7A
Comunicare Ethernet 1 Gb/s
WIFI 2,4GHz și 5GHz – 802,11 g/g/n/ac – (~31 dBm, <80dBm)
USB 2.0 și 3.0
Interfață/Programare Windows/MacOS/Linux (aplicație desktop) și API-uri
Consum de energie ~ 60 W
Materiale Aluminiu, PLA (imprimare 3D)
Porturi 1 Ethernet + 2 USB 3.0 + 2 USB 2.0
Om-Mașină
interfață 3 butoane de control (butonul „‘FreeMotion’’, butonul pentru salvarea unei poziții și butonul „‘Personalizat’’)
Inel LED
Difuzoare
Microfon
Senzor de detectare a coliziunii Senzor magnetic (pe motor)